Carnegie Mellon’s Biorobotics Lab is probably best known as the birthplace of the modular snake robot. Initially designed to squeeze into tight spots for search and rescue missions and infrastructure inspections, the lab’s snake robot has given rise to an army of different projects, and at least one Pittsburgh-area startup.
Several years ago, the robot became modular, allowing engineers to mix and match pieces and replace malfunctioning segments. From those modules, the team of CMU students have built a wide range of different projects, including a spider-like hexapod robot, whose six limbs are constructed from robotic segments. We also spent time with Hebi, whose modular robotic actuators commercialized versions of the lab’s research.
When we returned to the lab two years later, the researchers had an entirely new project to show us. “Students in this group are very self-directed, we come up with our own projects,” CMU doctoral student Julian Whitman explained. “We’re often inspired by the ability of our hardware to reconfigure into any kind of shapes. Sometimes people will look at a pile of modules. So they’ll build that and very quickly program it to do some kind of interesting behavior, and sometimes that’ll spur an entirely new research direction.”
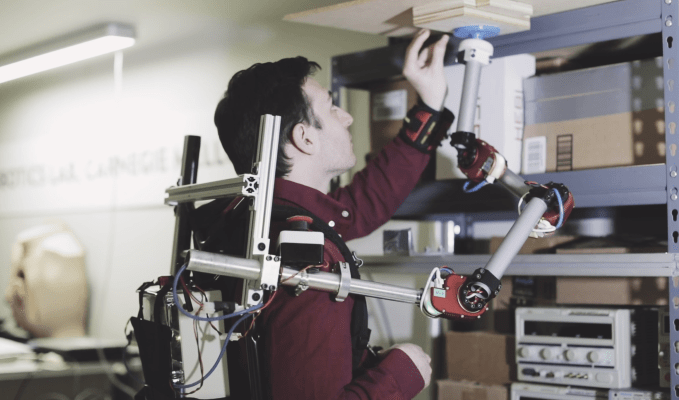
Whitman’s project fashions the modules into a wearable extra limb. The system, he’s quick to point out, isn’t an exoskeleton. Instead, it’s a robotic arm mounted to a backpack-style support structure. The idea behind the project is to allow wearers to complete jobs that are a bit too complex for just two hands.
“One somewhat common task in automotive assembly or airplane assembly is to hold something up over your head and fix it to the ceiling,” Whitman explained, before demoing the action at a nearby workstation. “So if you’re putting a part on the bottom of a car or on the roof of an airplane, oftentimes in industry, they have to have two people working on this job, one guy is just holding the part up in place, the other one’s fixing it.”
The project currently supports one limb, controlled using a game pad. Whitman explained it’s possible to add as many limbs “as a person can carry,” for a more Dr. Octopus-style approach. But the biggest limitation is how many a wearer can control at a given time.
“Right now I’m controlling it with a button or with voice commands, so you now have two sets of buttons and two sets of voice commands,” Whitman said. “At some point, it becomes harder for the user to control it and becomes less useful, the more arms you add. But in the future we’re hoping to have these arms be more autonomous that have their own perception, their own decision-making processes.”