One of Hyundai’s recent concept cars was an electric vehicle named “45” in honor of its inspiration, another concept car from 45 years ago. When footage of a child-sized “Mini 45” surfaced, it was easy to conclude the car was a motorized toy for children. But Jalopnik got more information from Hyundai about this project, where we learned that was not nearly the whole picture.
The video (embedded below) explained this little vehicle is a concept car in its own right, and most of the video is a scripted performance illustrating their concept: using technology to help calm young patients in a hospital, reducing their anxiety as they faced treatment procedures. Mini 45 packs a lot more equipment than the toy cars available at our local store. The little driver’s heartbeat and breathing rate are monitored, and a camera analyzes facial expressions to gauge emotional stress. The onboard computer has an animated avatar who will try to connect with the patient, armed with tools like colorful animations, happy music, candy scent dispenser, and a bubble-blowing machine.
Few things fascinate a simple Hackaday writer as much as a tiny robot. We’ve been watching [Keri]’s utterly beguiling micromouse builds for a while now, but the fifth version of the KERISE series (machine translation) of ‘bots takes the design to new heights.
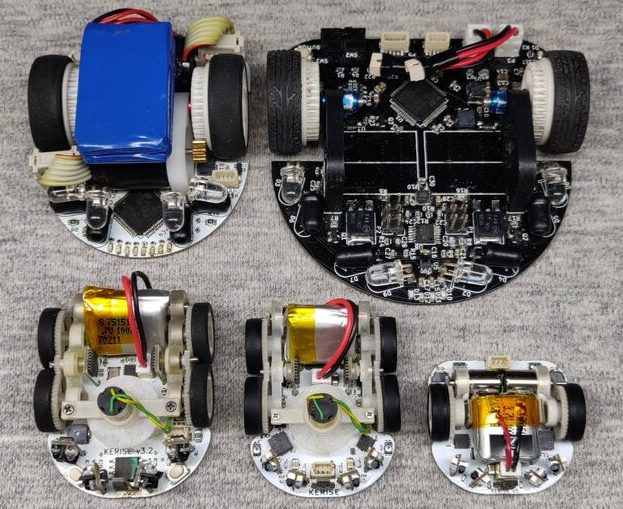
A family of mice v1 (largest) to v5 (smallest)
For context, micromouse is a competition where robots complete to solve mazes of varying pattern but standardized size by driving through them with no guidance or compute offboard of the robot itself. Historically the mazes were 3 meter squares composed of a 16 x 16 grid of cells, each 180mm on a side and 50mm tall, which puts bounds on the size of the robots involved.
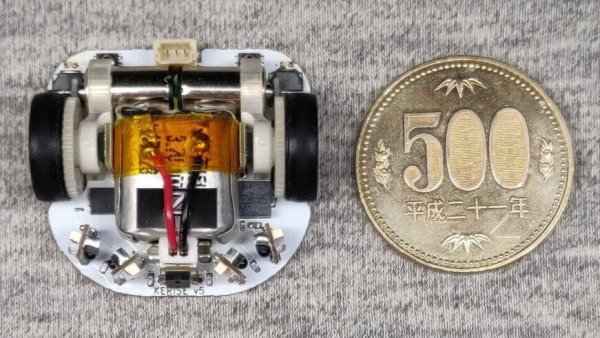
What are the hallmarks of a [Keri] micromouse design? Well this is micromouse, so everything is pretty small. But [Keri]’s attention to detail in forming miniaturized mechanisms and 3D structures out of PCBs really stands out. They’ve been building micromouse robots since 2016, testing new design features with each iteration. Versions three and four had a wild suction fan to improve traction for faster maneuvering, but the KERISE v5 removes this to emphasize light weight and small size. The resulting vehicle is a shocking 30mm x 32mm! We’re following along through a translation to English, but we gather that [Keri] feels that there is still plenty of space on the main PCBA now that the fan is gone.
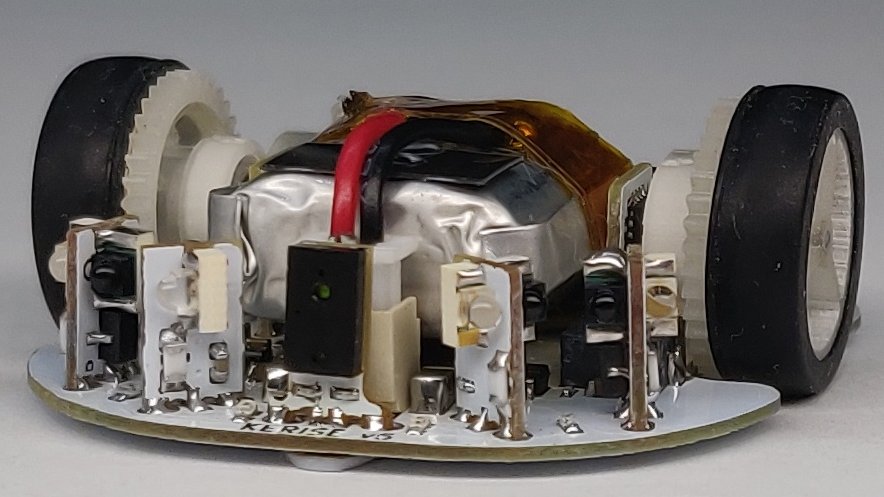
The KERISE v5 front end
The processor is a now familiar ESP32-PICO-D4, though the wireless radios are unused so far. As far as environmental sensing is concerned the v5 has an impressive compliment given its micro size. For position sensing there are custom magnetic encoders and a 3 DOF IMU. And for sensing the maze there are four side-looking IR emitter/receiver pairs and one forward-looking VL6180X laser rangefinder for measurements out to 100 or 150mm. Most of these sensors are mounted on little PCB ‘blades’ which are double sided (check out how the PCB shields the IR emitter from it’s receiver!) and soldered into slots perpendicular to the PCBA that makes up the main chassis. It goes without saying that the rest of the frame is built up of custom 3D printed parts and gearboxes.
If you’d like to build a KERISE yourself, [Keri] has what looks to be complete mechanical, electrical, and firmware sources for v1, v2, and v3 on their Github. To see the KERISE v5 dance on a spinning sheet of paper, check out the video after the break. You don’t want to miss it!
When we first saw [Barqunics’] design for a self-stabilizing spoon for people suffering from Parkinson’s disease, we wondered how well something like that could work. But take a look at the video below and you’ll see this does a fine job of responding to the user’s hand movements and keeping the spoon perfectly level through a wide range of motion.
There’s at least one commercial product that attempts to stabilize a spoon in the same way so that people suffering from that affliction can retain a measure of independence. This shows that you don’t need injection molding and factory made boards to prove the concept. An MPU6050 provides sensor information and two servo motors control the spoon using PID control.
PID — short for proportional, integral, derivative — is a way to adjust something to a desired point. For example, consider trying to heat a cup of water to 95 °C. If you simply turn the heater on full blast until you get to 95 °C, the water will actually get hotter because you’ll overshoot. Using PID, the amount of heating provided will depend on how far off you are now (proportional), how far off you’ve been over the long term (integral), and how much change you’ve effected recently (derivative). The same algorithm works for spoon-balancing and many other types of controls.
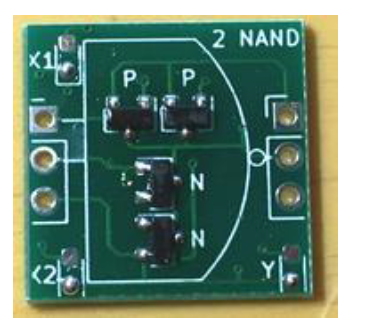
What do you get when you stick 1738 MOSFETs together? If your answer was a ‘4-bit CPU’, you would be totally correct. Available as a product over at Marutsu as the ‘CPU1738’, it seems to target beginners to computer theory, with build instructions that explain how the CPU is built up from individual MOSFETs that are combined into logic gates.
A CPU1738 NAND PCB.
While decidedly more compact in its SMD format than it would have been with pure through-hole parts, the use of countless small PCBs on top of the larger PCBs make for a pretty hefty package. Board after board build up the CPU, and the assembly continues with the addition of sensors, motors, and wheels. In the end, a robot emerges, albeit a somewhat wobbly-looking one.
Check out the video linked after the break, though before starting one up, note the 50,000 Yen (approximately $500) price tag for the CPU block alone. On the other hand, in addition to the 1738 MOSFETs, there are also 1070 LEDs, so you get what you pay for in blinkies.
[3DprintedLife] sure does hate bread crust. Not the upper portion of homemade bread, mind you — just that nasty stuff around the edges of store-bought loaves. Several dozen hours of CAD later, [3DprintedLife] had themselves a crust-cutting robot that also chops vegetables.
This De-Cruster 9000 is essentially a 2-axis robotic guillotine over a turntable. It uses a Raspberry Pi 4 and OpenCV to seek and destroy bread crusts with a dull dollar store knife. Aside from the compact design, our favorite part has to be the firmware limit switches baked into the custom control board. The stepper drivers have this fancy feature called StallGuard™ that constantly reads the back EMF to determine the load the motor is under. If you have it flag you right before the motor hits the end of the rail and stalls, bam, you have a firmware limit switch. Watch it remove crusts and chop a lot of carrots with faces after the break.
Creativity is a very human trait, and one that many try to emulate with robots. Some focus on the cerebral side of things, working with neural networks and machine learning to produce new artistic output. Others work on the mechanical side, building ‘bots that can manipulate tools in the real world for artistic purposes. [Technovation]’s latest build falls into the latter category – a small Arduino-powered ‘bot that likes to paint.
The robot moves around on two wheels, each driven by a stepper motor for accurate movement. The paintbrush itself is controlled with another stepper, which rotates it between the paint pots and the canvas. A servo is used to dip the brush into pots, and to apply it to the canvas. An Arduino Uno runs the show, with the robot currently programmed to paint random lines of various colors on the canvas.
By virtue of its roving design, it could theoretically paint on arbitrarily large canvasses. It’s a platform that could prove highly capable when paired with a neural network and perhaps some machine vision to allow it to concoct more complex artworks. We’ve seen other paint bots before, too. Video after the break.
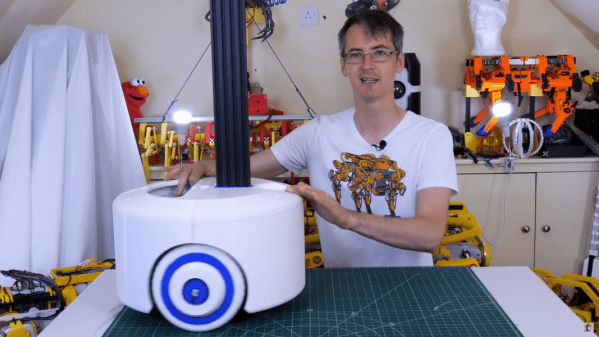
[James Bruton] is an impressive roboticist, building all kinds of robots from tracked, exploring robots to Boston Dynamics-esque legged robots. However, many of the robots are proof-of-concept builds that explore machine learning, computer vision, or unique movements and characteristics. This latest build make use of everything he’s learned from building those but strives to be useful on a day-to-day basis as well, and is part of the beginning of a series he is doing on building a Really Useful Robot. (Video, embedded below.)
While the robot isn’t quite finished yet, his first video in this series explores the idea behind the build and the construction of the base of the robot itself. He wants this robot to be able to navigate its environment but also carry out instructions such as retrieving a small object from a table. For that it needs a heavy base which is built from large 3D-printed panels with two brushless motors with encoders for driving the custom wheels, along with a suspension built from casters and a special hinge. Also included in the base is an Nvidia Jetson for running the robot, and also handling some heavy lifting tasks such as image recognition.
As of this writing, [James] has also released his second video in the series which goes into detail about the mapping and navigation functions of the robots, and we’re excited to see the finished product. Of course, if you want to see some of [James]’s other projects be sure to check out his tracked rover or his investigations into legged robots.