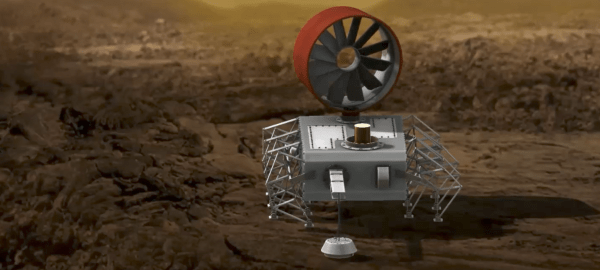
There’s a little problem with sending drones to Venus: it’s too hostile for electronics; the temperature averages 867 °F and the pressure at sea level is 90 atmospheres. The world duration record is 2 hours and 7 minutes, courtesy of Russia’s Venera 13 probe. To tackle the problem, JPL has created a concept for AREE, a mechanical robot designed to survive in that environment.
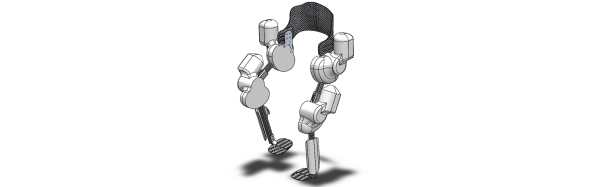
AREE consists of a Strandbeest configuration of multiple legs with a monster fan propelling it, and one can imagine it creeping over the Venusian landscape. While its propulsion system might be handled by the Strandbeest mechanism, it will still have to navigate and transmit data. We’re not sure how a mechanical radio wave might work–maybe like those propeller arrow-cutters that [Dain of the Iron Hills] busts out in movie version of the Hobbit? Chemical rockets that somehow don’t spontaneously ignite? Or maybe it can just “transfer all energy to life support” and AC the heck out of the radio.
We’re space nerds here at Hackaday–check out our piece about NASA employees’ talks at the 2016 Hackaday Superconference and our extracurricular tour of JPL.