Robot jellyfish, developed by Florida Atlantic University (FAU) and the U.S. Office of Naval Research scientists, are ready to offer damage-free monitoring and care for the world’s oceans.
The team decided to target their soft robotics tech toward jellyfish swimming methods. Their high aquatic efficiency made them an “excellent candidate for underwater robot design inspiration,” according to the researchers. Specifically, the scientists favored their combination of jet propulsion, rowing, vortex, and suction-based locomotion.
“One main application of the jellyfish robot is for exploring and monitoring delicate ecosystems, so soft hydraulic network actuators were chosen due to their inherent potential to minimize inadvertent damage to fragile biological systems,” according to the research team.
The robots steer by using two impeller pumps, which inflate each of the eight tentacles (four per pump). According to the team, an open circuit of water flow is achieved, “where water from the environment was pumped into the soft actuators to produce a swimming stroke.” When the pumps don’t receive power, the actuators undergo constriction to expel the water back into the ocean. This stage of locomotion is known as the relaxation phase.
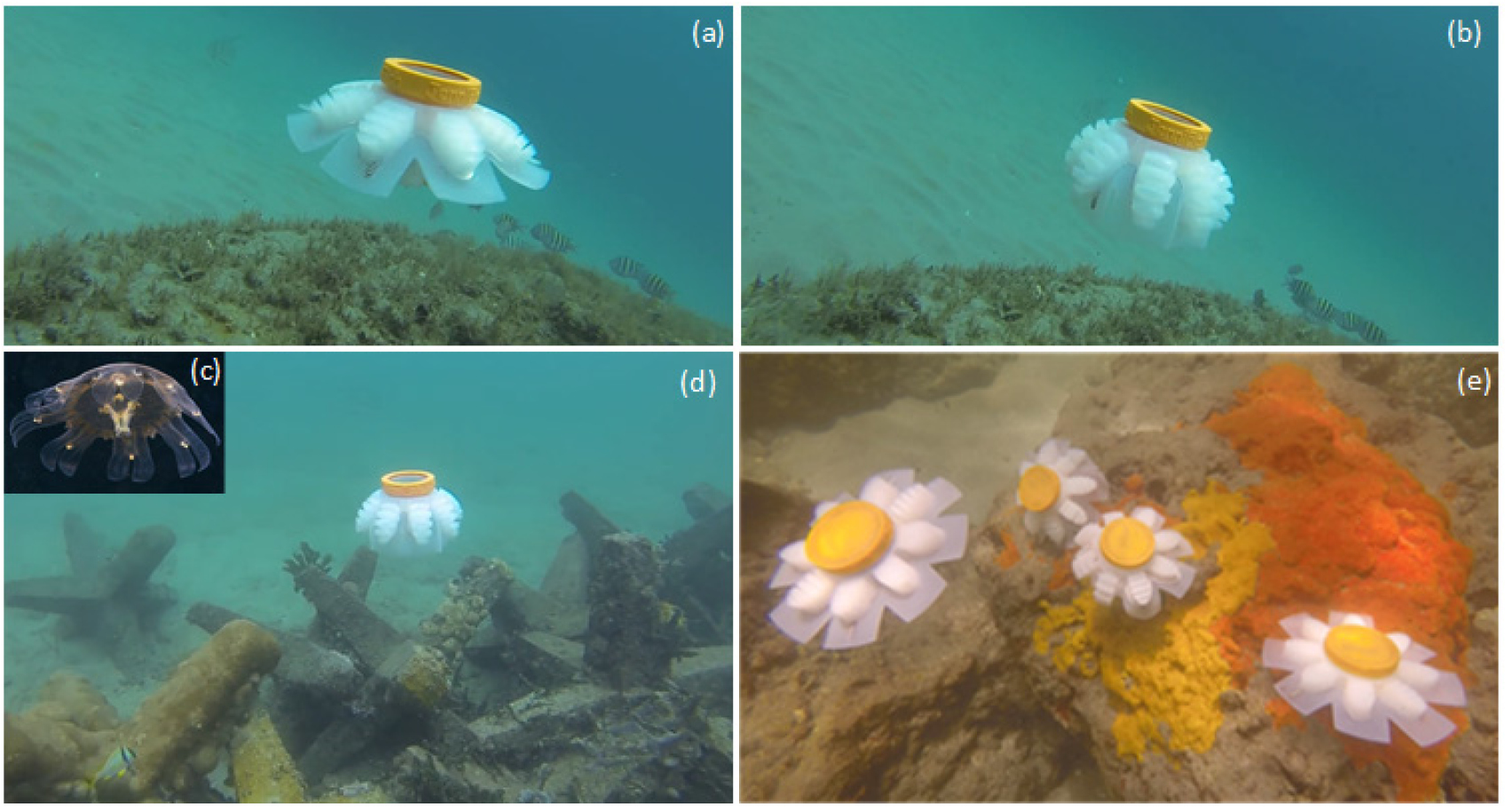
In the image below, you can see in (a) and (b) the robot traversing the Atlantic Ocean, demonstrating vertical swimming. The robot jellyfish then traveled to the EroJacks Reef (d), showcasing their free swimming techniques. Finally, part (e) depicts four devices banding together in the ocean.
The robots were designed in SolidWorks and 3D printed with an Ultimaker 2 out of PLA. Jellyfish control was obtained using a Teensy USB development board, and the electronics and sensors were housed on printed circuit boards (PCBs). In order to communicate without opening the electronics housing, the robots had two motherboard-mounted Allegro Microsystems, Inc. Hall effect sensors (A3212EUA-T), which enabled magnetic communication.
The operators were able to receive visual feedback via three LEDs on the PCB. Although not present in the current set of experiments, the team plans to add IMU and temperature sensors, which will grant the devices environmental and self-sensing abilities.
In trials with five jellyfish robots, the team analyzed the impact of thrust force measurements from a variety of factors, including material Shore hardness, actuation frequency, and stroke amplitude, among others.
“It was found that all three of these factors significantly impacted mean thrust force generation, which peaked with a half-stroke actuation amplitude at a frequency of 0.8 Hz,” according to the research team.
Read the article, “Thrust force characterization of free-swimming soft robotic jellyfish,” published in Bioinspiration & Biomimetics, to learn more.
